Tentative: Une Reprap encore plus low-cost, chapitre 1
Moi aussi j'ai été étudiant et j'ai pas toujours eu des fins de mois facile. L'idée globale est de permettre l'accès à la technologie à tous et pour tous. Il me semble donc intéressant d'essayer de développer une imprimante 3D qui se présente à moindre frais...
Le plan de bataille est simple: trouver la manière de faire une reprap low-cost (200€ max serait un bon début).
Le plan de bataille est simple: trouver la manière de faire une reprap low-cost (200€ max serait un bon début).
C'est une tentative, ce n'est pas sur que cela passe marche.
 |
| Wallace de whosawthis postée sur thingiverse. |
- Une base printrbot / Wallace de whosawhatsis
- Des moteurs 48 pas unipolaire pour certaines parties (axe Z au moins)
- Les moteurs unipolaires peuvent être commander par des ULN2003/ULN2803 avec un pic pour les piloter en simple, 1/2 (half-stepping)ou 1/4 microstepping.
- Une gen7 de base modifier avec des contrôleurs mixtes: je table sur pic 12F (avr tiny est aussi possible) + ULN2003 ou A3967 pour un ou deux bipolaires.
- Une plaque a essai pour la plaque chauffante, si c'est le moins cher, il faudra voir si il n'y a pas mieux.
- Trouver des astuces pour économiser (récupération, autres idées...)
Test des moteurs unipolaires 55SI et commande par L'ULN2003A:
Caractéristiques techniques du 55SI:
Caractéristiques techniques du 55SI:
 |
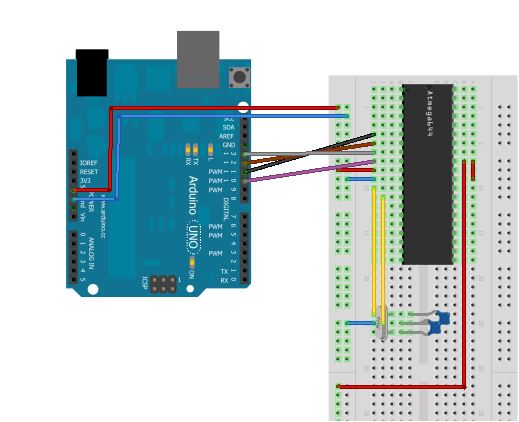
| 55SI commandé par l'UNL2003 et un Arduino UNO |
- Tension nominale : 12 Volts.
- Courant nominal : 330 mA.
- Résistance de bobine : 36 Ohms
- Inductance : 37mH.
- Couple moteur bloqué : 1350 g/cm.
- Degré d’angle : 7.5°
- Nombre de pas par tour : 48
- Axe : 6.35mm avec méplat - longueur 17 mm monté sur paliers bronze.
- Fixation par 2 oreilles entraxe 66 mm (trous de 4.4 mm).
- Diamètre moteur : 55 mm (largeur avec oreilles : 79.4 mm).
- Hauteur moteur hors axe et palier : 25 mm.
L'ULN2003A est malheureusement limité à 500mA en charge totale (à vérifier).
J'ai trouvé des moteurs unipolaires 48pas 55SI-25D à 3.30€ l’unité.
Les ULN2003A sont a 0.6€ en général et les pic 12F683 et 12F508 sont à environ 2.5€
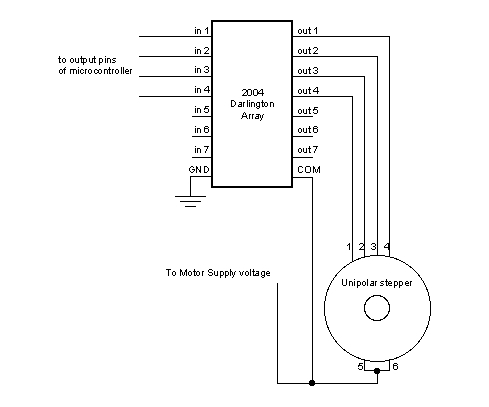
Pour le moment par facilité, j'ai testé l'ULN2003 avec un arduino UNO et une librairie de base.
Le cablage est simple et ne risque rien vu le circuit (à moins de faire un court-circuit mais il faudrait le vouloir ;) ). Les pins sont spécifiées dans l'exemple de base sur le logiciel Arduino.
En appliquant cela, pas de chauffe de du circuit de commande, même en bloquant le moteur et le laissant tourner un moment.
J'ai trouvé cette librairie: half stepping donc j'ai retenté la manip, aucun problème, cela tourne sur 96 pas. Pas de chauffe, rien à redire, j'ai surveillé rapidement le courant on passe rarement au dessus de 300mA à 12V.
Pour le moment deux problèmes avec ces moteurs:
- La taille: il faudra peut être redimensionner les pièces de printrbot
- L'axe central de 6.35mm (1/4 pouces), donc il faudra adapter les pièces de transitions.
- 96 microsteps directement sur une poulie à 8 dents T5 (5mm de pas) ca donnerais une révolution pour 8*5mm = 40mm donc 2.4 pas par mm ce qui est très peu...
Ca voudrait dire qu'un pas fait 0.42 mm en positionnement XY environ ce qui est bien trop peu...Cependant sur les comparaisons de la Mendel ils spécifient une précision de 0.1mm en positionnement. Donc avec une démultiplication de 1/4 on retombe à peu près sur nos pattes. Il va donc falloir prévoir cela sur notre machine en X et Y si l'on veut utiliser ces moteurs.
En Z vu qu'on a un pas de 1mm, ça veut dire une précision de 1/96 mm ce qui est amplement suffisant.
Il nous reste donc deux paramètres à faire attention:
- la vitesse, si on démultiplie par 4 la transmission on risque d'avoir des problèmes de saturations en vitesse... donc a voir,
- la force, si on démultiplie on multipliera par un peu moins de 4 donc pas de soucis normalement.
Nous verrons bien ce que l'on peut en tirer.
On aurait aussi eu la possibilité d'utiliser le moteur en Bipolaire et de le gérer via l'A3967 mais j'ai peur de perdre en force vu que l'on double de bobinage entre 2 poles (on double donc la résistance aussi donc le courant).

salut, je monte en ce moment une huxley, une fois celle ci opérationnelle, on enchainera par un printrbot ou une de ses variantes comme la wallace.
RépondreSupprimersi tu veux réduire les coûts, tu peux récupérer plein de pièces sur des imprimantes jet d'encre (généralement au moins une barre acier de diamètre 6 à 10, des moteurs pas à pas, des courroies, des engrenages, des optocoupleurs... tu trouveras ça aussi dans les scanners, qui sont bien plus faciles à démonter (en plus tu auras du néon pour éclairer l'imprimante ^^)
et concernant la partie electronique, visiblement tu as envie de te la concevoir et fabriquer par toi même. j'avais moi aussi envie de passer par là mais en regardant le vaste choix des platines de gestions sur le site reprap.org, j'ai opté pour une RAMPS v1,4 mais visiblement les solutions Gen7 sont un peu plus économiques.
bon courage.
FX
Je vois que je suis pas le seul à penser à la PrintrBot/Wallace.
RépondreSupprimerPour la récup, je me suis déjà fait un petit stock de moteur d'imprimantes.
J'essaye juste de faire une base "achetable" mais c'est juste une base, si on récupère des pièces qui sont adaptables alors on les soustraits de l'addition finale.
C'est juste qu'on arrive maintenant à faire des imprimantes de petites tailles et donc demandant des efforts bien plus faible , je suppose qu'on peut donc diminuer le coût total plutôt qu'acheter des moteurs sur-dimensionnés.
L'électronique, je suppose que je peux m'en sortir en faisant des platines qui s'adaptent à la gen7. Sinon refaire un circuit en prenant la base gen7.
et celle là?
RépondreSupprimerhttp://www.thingiverse.com/thing:15611
Trop chère :D
RépondreSupprimer